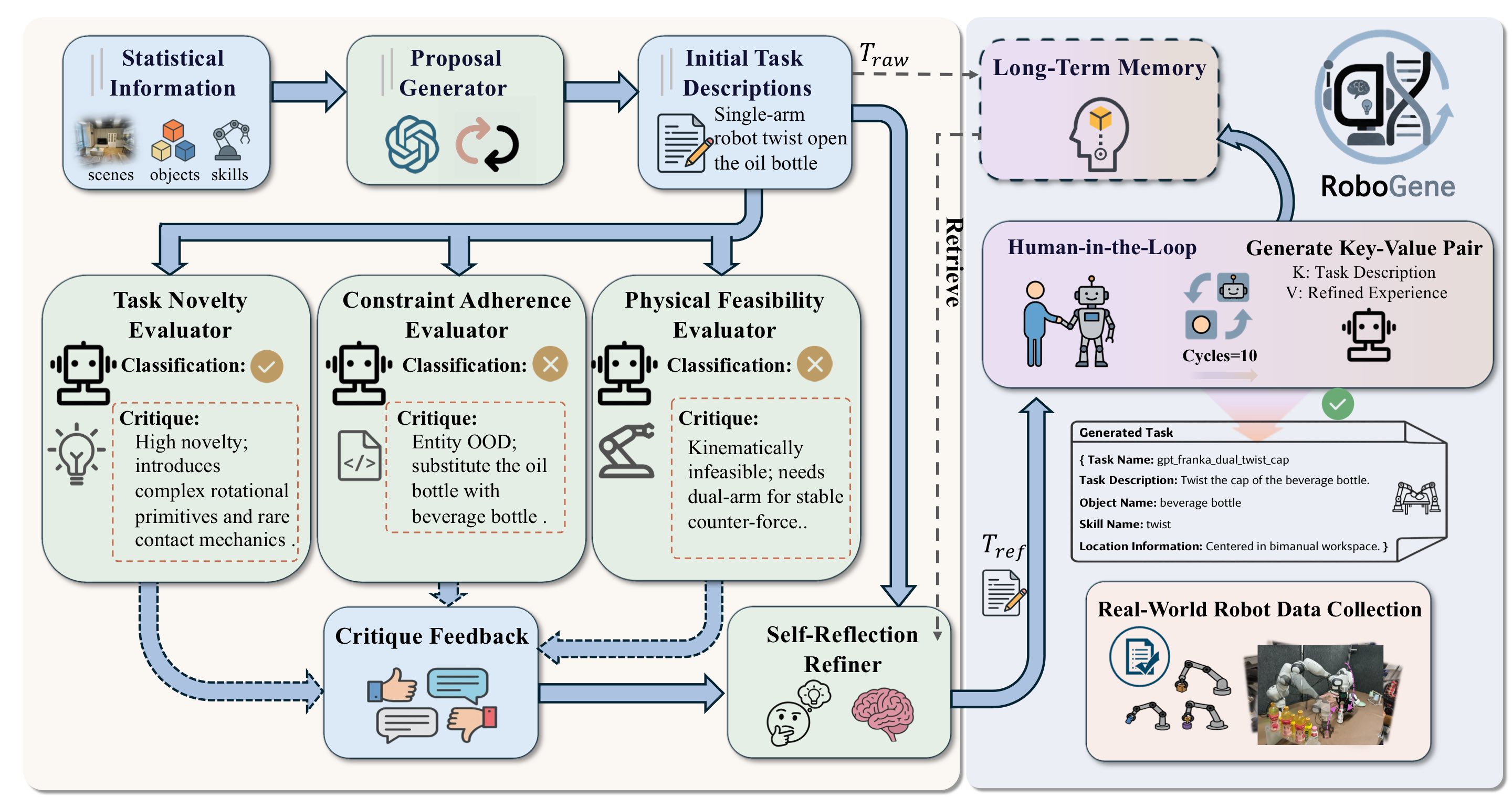
Diversity-driven agentic framework integrated with self-reflection and memory
RoboGene: Boosting VLA Pre-training via Diversity-Driven Agentic Framework
An automated framework for generating diverse, physically plausible manipulation tasks to enhance Vision-Language-Action model pre-training